All Courses
선형대수학의 본질
3b1b12 lectures
Course Content
1
Why visual understanding of linear algebra matters first
This lesson builds an intuitive, picture-first understanding of eigenvalues and eigenvectors. Instead of starting with heavy equations, it treats a matrix as a machine that reshapes the whole 2D plane and then looks for special directions that do not turn. These special directions are eigenvectors, and the stretch or shrink amount along them is the eigenvalue. You will see why some vectors change both length and direction, while a few special ones only change length.
3Blue1Brown Koreanbeginner
2
Chapter 1: Vectors, what even are they? | Essence of Linear Algebra
This lesson explains what a vector really is from three connected views: a directed arrow in space, a coordinate like (4, 3), and a list of numbers like [4, 3]. Thinking of vectors as arrows makes direction and length feel natural, while coordinates make calculation easy. Both are the same thing described in different ways. You can move an arrow anywhere without changing the vector, as long as its direction and length stay the same.
3Blue1Brown Koreanbeginner
3
Chapter 2: Linear combinations, span, and basis vectors | Essence of Linear Algebra
This lesson teaches three core ideas in linear algebra: linear combinations, span, and basis vectors. A linear combination is when you multiply vectors by numbers (scalars) and add them. The span is the set of all places you can reach using those linear combinations. A basis is a special set of vectors that both spans the space and doesn’t contain any vector that can be made from the others.
3Blue1Brown Koreanbeginner
4
Chapter 3: Linear transformations and matrices | Essence of Linear Algebra
This lesson explains linear transformations: special functions that move every point in space to a new point while keeping straight lines straight and keeping the origin fixed. You learn why not all transformations are linear and how these two rules act like a “truth test.” Examples include scaling (stretching/shrinking) and rotation, which are linear, and translation, which is not because it moves the origin.
3Blue1Brown Koreanbeginner
5
Chapter 4: Matrix multiplication as composition | Essence of Linear Algebra
This lesson shows a new way to see matrix multiplication: as doing one geometric change to space and then another. Instead of thinking of matrices as number grids, you think of them as machines that move every vector to a new place. When you do two moves in a row, that is called composition, and it is exactly what matrix multiplication represents. The big idea is that one single matrix can capture the effect of doing two transformations in sequence.
3Blue1Brown Koreanbeginner
6
Chapter 5: Three-dimensional linear transformations | Essence of Linear Algebra
Three-dimensional linear transformations change the whole 3D space while keeping the origin fixed and all grid lines straight and parallel. This is just like in 2D, but now there are three axes: x, y, and z. These transformations stretch, rotate, shear (slant), or reflect the space without bending or curving it.
3Blue1Brown Koreanbeginner
7
Chapter 6: The determinant | Essence of Linear Algebra
The determinant is a single number attached to every square matrix that tells how a linear transformation scales area in 2D or volume in 3D. Its absolute value is the scale factor, and its sign tells whether the transformation keeps orientation or flips it. Think of dropping a 1-by-1 square (or 1-by-1-by-1 cube) into the transformation and measuring what size it becomes.
3Blue1Brown Koreanbeginner
8
Chapter 7: Inverse matrices, column space, and null space | Essence of Linear Algebra
Matrices represent linear transformations, which are rules that stretch, rotate, shear, or squash space while keeping straight lines straight and the origin fixed. When you multiply matrices, you are chaining these transformations: first do one change to space, then do the next. Some transformations lose information by collapsing dimensions, like flattening a whole plane onto a line, and those cannot be undone.
3Blue1Brown Koreanbeginner
9
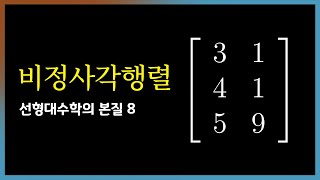
Chapter 8: Nonsquare matrices as transformations between dimensions | Essence of Linear Algebra
A matrix with different numbers of rows and columns models a transformation between spaces of different sizes. For example, a 3-by-2 matrix takes 2D vectors from the flat plane and turns them into 3D vectors in space. The columns of the matrix tell you exactly where the basic 2D directions (i-hat and j-hat) end up in 3D. Using this rule, any 2D input can be mapped by combining those columns.
3Blue1Brown Koreanbeginner
10
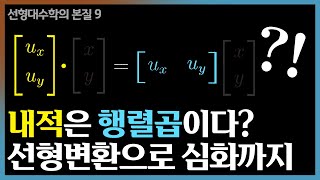
Chapter 9: Dot products and duality | Essence of Linear Algebra
Dot product (also called inner product) takes two vectors and gives one number by multiplying matching coordinates and adding them. For example, with V=(3,2) and W=(4,-1), the dot product is 3*4 + 2*(-1) = 10. This single number is not just arithmetic; it measures how much V goes in the direction of W. If V points with W, the number is positive; if against, it’s negative; if perpendicular, it’s near zero.
3Blue1Brown Koreanbeginner
11
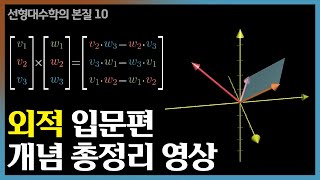
Chapter 10: Cross products | Essence of Linear Algebra
The cross product takes two 3D vectors and produces a third vector that is perpendicular to both. Its direction follows the right-hand rule: curl your fingers from the first vector to the second, and your thumb points in the cross product’s direction. Its length equals the area of the parallelogram formed by the two input vectors. If the two vectors are parallel, the cross product is the zero vector.
3Blue1Brown Koreanbeginner
12
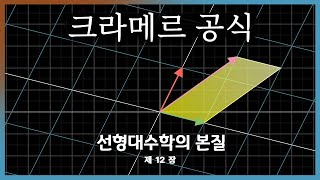
Chapter 12: A geometric interpretation of Cramer's rule | Essence of Linear Algebra
This lesson explains Cramer's rule using geometry. A linear system like 2x + 5y = 7 and −3x + 4y = −1 can be written as Ax = v, where A’s columns are two vectors a1 and a2. The solution (x, y) tells how much to stretch and add a1 and a2 to land exactly on v.
3Blue1Brown Koreanbeginner